Transcortical bone screw simulation and navigation
Pedicle screw instrumentation is the dominant surgical approach to achieve immediate stability of the spine. Transcortical screw insertion is an emerging technique of posterior spinal instrumentation with promising biomechanical properties; it requires a more medialized start point and follows an “up and out” trajectory. The objective of this work is to validate a freehand technique for insertion of transcortical screws.
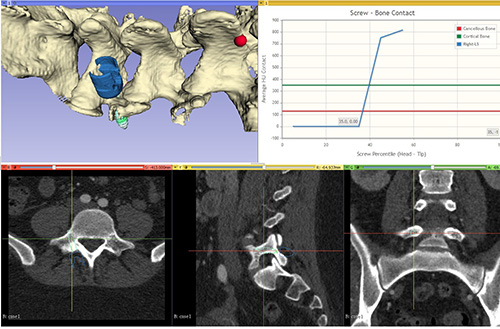
A custom surgical simulator was used to determine appropriate freehand techniques of cortical screw insertion in the thoracic and lumbar spine. Specifically, case-specific volume rendering of non-pathologic and degenerative/scoliotic thoracic and lumbar spine CTs were used.
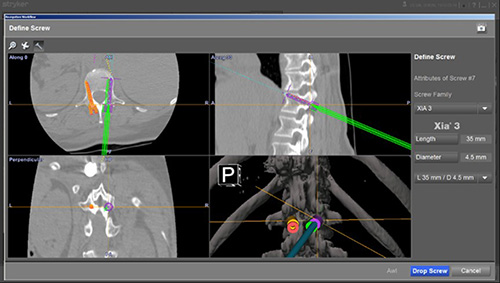
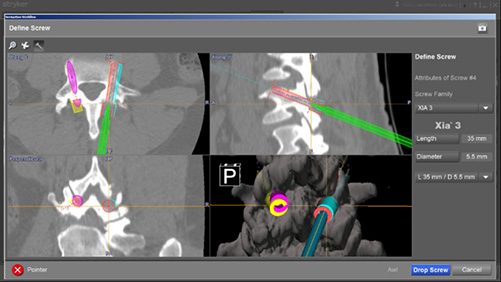
The start point and trajectory determination were modified from previously published methods by assessing screw fixation and purchase virtually using CT density data. Once identifiable and reproducible anatomic landmarks (Transverse Process, Pars interarticularis, midline) of the posterior spine were selected based on simulation, these methods were translated to the operating room. The vertebral level specific approach and landmarks were then checked against a Stryker based navigation system. In all cases, the freehand technique was deemed to place cortical screws ideally or safely.
The usage of transcortical screw fixation in the lumbar and thoracic spine may be a reasonable and expeditious alternative to pedicle screw fixation with the distinct advantage of limiting further lateral dissection, simpler and reproducible screw insertion start points and trajectories, and decreased risk of undesired screw breaches. This project demonstrates the power of virtual 3D interaction with medical imaging for surgical planning and technique generation.

